Posts by Dustin Franklin

Edge Computing
Oct 19, 2023
Bringing Generative AI to Life with NVIDIA Jetson
Recently, NVIDIA unveiled Jetson Generative AI Lab, which empowers developers to explore the limitless possibilities of generative AI in a real-world setting...
11 MIN READ

Robotics
Oct 05, 2020
Introducing the Ultimate Starter AI Computer, the NVIDIA Jetson Nano 2GB Developer Kit
Today, NVIDIA announced the Jetson Nano 2GB Developer Kit, the ideal hands-on platform for teaching, learning, and developing AI and robotics applications. The...
7 MIN READ

Robotics
Aug 19, 2020
Announcing ONNX Runtime Availability in the NVIDIA Jetson Zoo for High Performance Inferencing
Microsoft and NVIDIA have collaborated to build, validate and publish the ONNX Runtime Python package and Docker container for the NVIDIA Jetson platform,...
6 MIN READ
Robotics
May 14, 2020
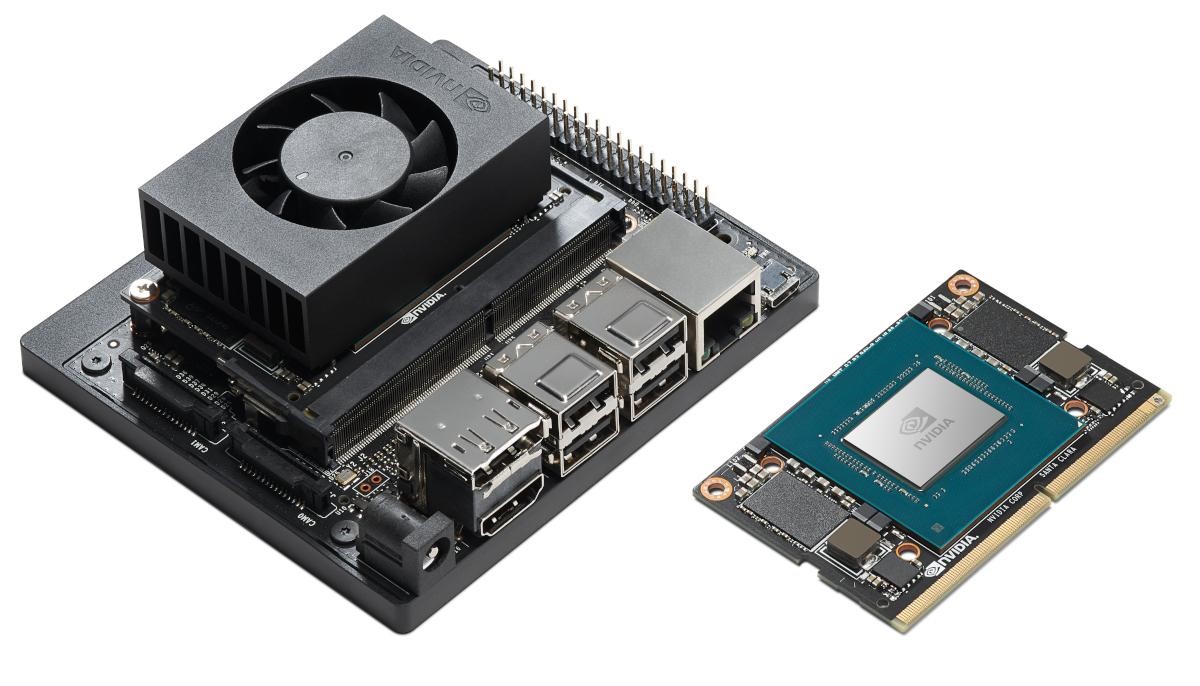
Bringing Cloud-Native Agility to Edge AI Devices with the NVIDIA Jetson Xavier NX Developer Kit
Figure 1. NVIDIA Jetson Xavier NX Developer Kit and production compute module. Today, NVIDIA announced the NVIDIA Jetson Xavier NX Developer Kit , which is...
11 MIN READ
Robotics
Nov 06, 2019
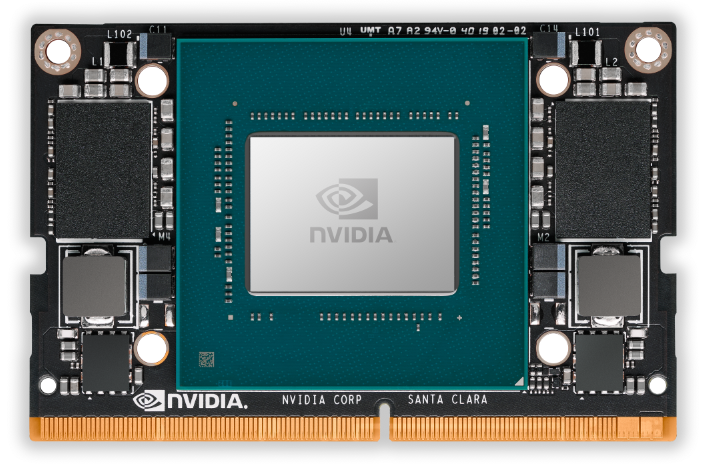
Introducing Jetson Xavier NX, the World’s Smallest AI Supercomputer
Today NVIDIA announced Jetson Xavier NX, the world’s smallest, most advanced embedded AI supercomputer for autonomous robotics and edge computing devices....
9 MIN READ

Data Science
Mar 18, 2019
Jetson Nano Brings AI Computing to Everyone
Update: Jetson Nano and JetBot webinars. We've received a high level of interest in Jetson Nano and JetBot, so we're hosting two webinars to cover these...
13 MIN READ