This post covers best practices for using SetStablePowerState on NVIDIA GPUs. To get a high and consistent frame rate in your applications, see all Advanced API...
Advanced Kernel Profiling with the Latest Nsight Compute
NVIDIA Nsight Compute is an interactive kernel profiler for CUDA applications. It provides detailed performance metrics and API debugging through a user...
Transitioning to Nsight Systems from NVIDIA Visual Profiler / nvprof
The Nsight suite of profiling tools now supersedes the NVIDIA Visual Profiler (NVVP) and nvprof. Let’s look at what this means for NVIDIA Visual Profiler or...
TensorFlow Performance Logging Plugin nvtx-plugins-tf Goes Public
The new nvtx-plugins-tf library enables users to add performance logging nodes to TensorFlow graphs. (TensorFlow is an open source library widely used for...
Vulkan is a low-overhead, cross-platform 3D graphics and compute API targeting a wide variety of devices from cloud gaming servers, to PCs and embedded...
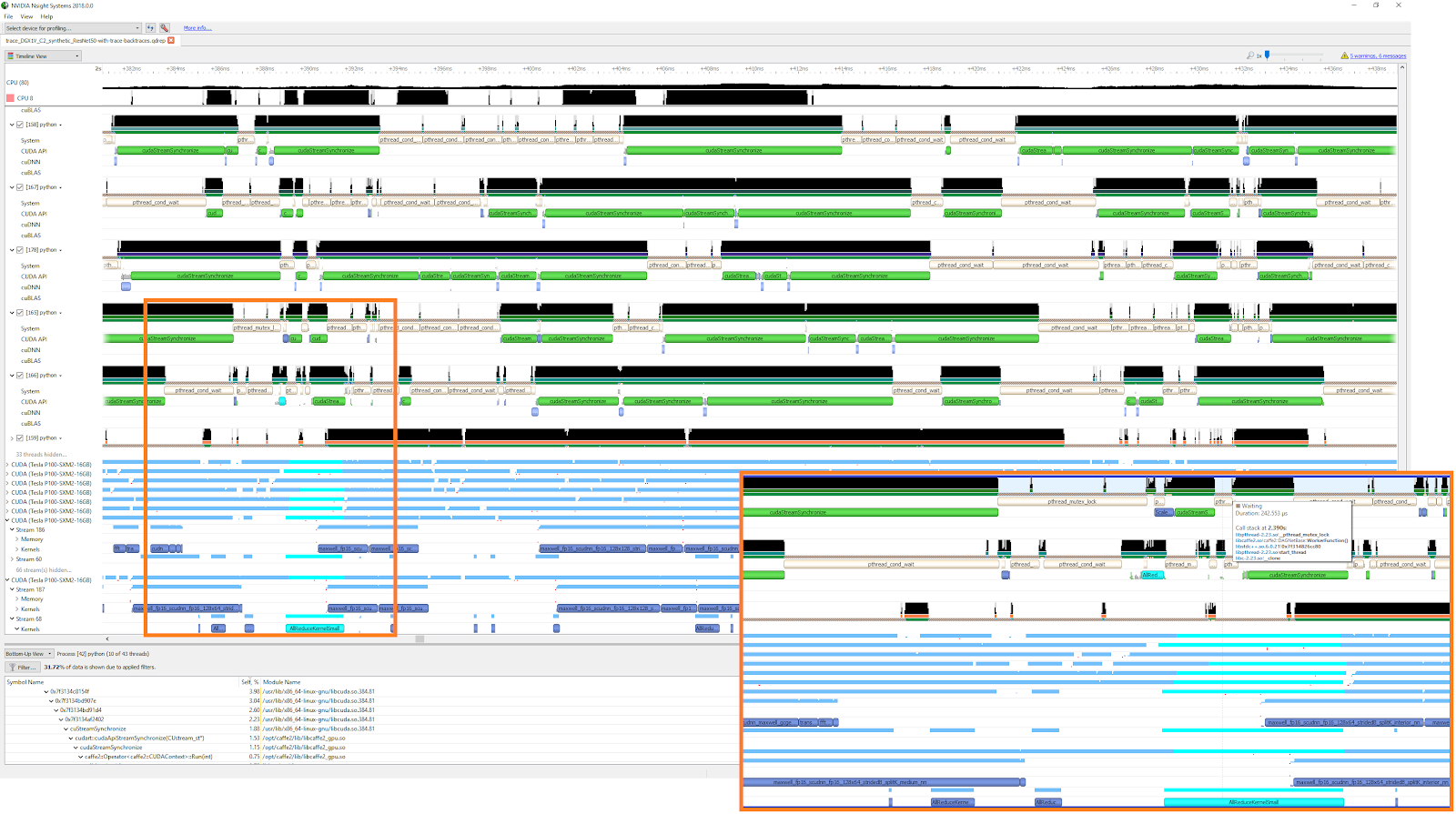
Nsight Systems Exposes New GPU Optimization Opportunities
As GPU performance steadily ramps up, your application may be overdue for a tune-up to keep pace. Developers have used independent CPU profilers and GPU...
Today I'm excited to announce the general availability of CUDA 8, the latest update to NVIDIA's powerful parallel computing platform and programming model. In...
The NVIDIA Tools Extension (NVTX) library lets developers annotate custom events and ranges within the profiling timelines generated using tools such as the...
CUDA 7.5: Pinpoint Performance Problems with Instruction-Level Profiling
[Note: Thejaswi Rao also contributed to the code optimizations shown in this post.] Today NVIDIA released CUDA 7.5, the latest release of the powerful CUDA...
Today I'm happy to announce that the CUDA Toolkit 7.5 Release Candidate is now available. The CUDA Toolkit 7.5 adds support for FP16 storage for up to 2x larger...
GPU Pro Tip: Track MPI Calls In The NVIDIA Visual Profiler
Often when profiling GPU-accelerated applications that run on clusters, one needs to visualize MPI (Message Passing Interface) calls on the GPU timeline in the...
Learn GPU Computing with Hands-On Labs at GTC 2015
Every year NVIDIA’s GPU Technology Conference (GTC) gets bigger and better. One of the aims of GTC is to give developers, scientists, and practitioners...
Heterogeneous computing is about efficiently using all processors in the system, including CPUs and GPUs. To do this, applications must execute functions...
Remote Application Development using NVIDIA Nsight Eclipse Edition
NVIDIA Nsight Eclipse Edition (NSEE) is a full-featured unified CPU+GPU integrated development environment(IDE) that lets you easily develop CUDA applications...
R is a free software environment for statistical computing and graphics that provides a programming language and built-in libraries of mathematics operations...
When I profile MPI+CUDA applications, sometimes performance issues only occur for certain MPI ranks. To fix these, it's necessary to identify the MPI rank where...